Vision: "Enabling Sustainable Autonomy (Sustonomy) Through Innovative Power Solutions."
Research Interests

Summary of Ongoing Research Projects
1. Wireless Power Transfer Technology for Drones
Drones are used in a
variety of applications such as surveillance, agriculture, inspection of power
lines, aerial mapping, and courier services. They are powered by batteries
that generally have a low battery capacity. These batteries require frequent charging
which means the drone needs to make a return flight to a base station to
physically connect the battery to power. As a result, the range of operation of
these vehicles as well as their flight time is limited. Wireless charging
provides a smart, convenient, and time efficient solution that can increase a
drone’s functionality. Inductive Power Transfer
(IPT) is the most commonly used technology for wireless power transfer in
drones. Fig. 1 shows a rectangular double helix receiver coil proposed by Uvir Gordhan, an MSc student at UCT. The proposed coils can be easily fitted into the two of the T-Shaped Landing gear and demonstrate superior performance compared to the existing solenoid coils.

Fig. 1
2. Electromagnetic Energy Robotics
Electromagnetic energy robotics is a rapidly advancing field that leverages the principles of electromagnetic induction to create innovative robotic systems. By harnessing the power of electromagnetic fields, these robots can achieve precise motion control, dexterous manipulation, and efficient energy transfer. This technology has far-reaching potential in various domains, including medicine, manufacturing, and aerospace. In this project, we aim to introduce novel magnetic structures to enable multiple degrees of freedom in motion through electromagnetic actuation.

3. Wireless Power Transfer Technology for Electric Vehicle
Autonomous electric vehicles(EVs) are the future of the transportation industry, where wireless power transfer (WPT) technology will improve operational flexibility as it replaces human interaction in traditional wired charging methods. Galvanic isolation and spark-free operation of inductive power transfer (IPT) systems will further enhance the safety aspects of charging EVs. IPT systems are used for both stationary and dynamic charging. Stationary charging is implemented in households and parking bays, while dynamic charging is implemented in roads and industrial environments where multiple transmitting coils are embedded in the ground. Both systems have a single receiving coil in the EV. However, stationary charging systems offer better charging control and reliability than dynamic systems.
Currently, we have a project that aims to optimize the performance of the coupler of the IPT system by considering various operating deviations.
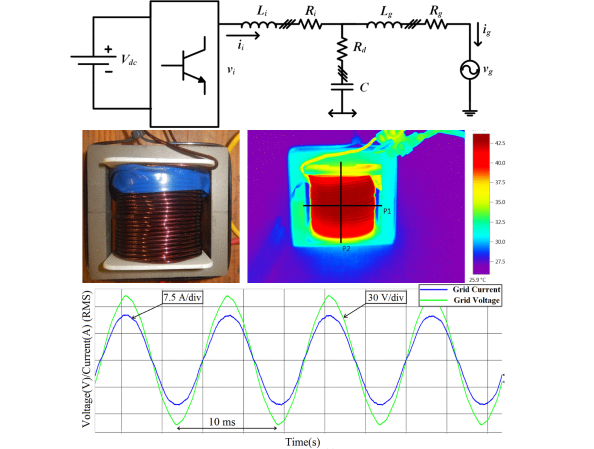
4. Passive Filters for Power Converters
Passive filters play a critical role in every power electronics converter. Often, the designers want to reduce their sizes while improving the overall performance. The novel magnetic materials and advancements in finite element analysis software have revolutionized filter design approaches.
In past, we have proposed design methodologies to improve the performance of the converters by utilizing the soft saturation nature of powder materials. The proposed methodologies are widely used in industry and academia due to their comprehensive nature.
We are currently developing robust filters capable of operating under various extremes inherent to power applications.
5. Grid Forming Inverters
This project aims to utilize the new general power theory proposed by Prof. Trevor Gaunt to support the grid using grid-forming inverters. Project details to follow.
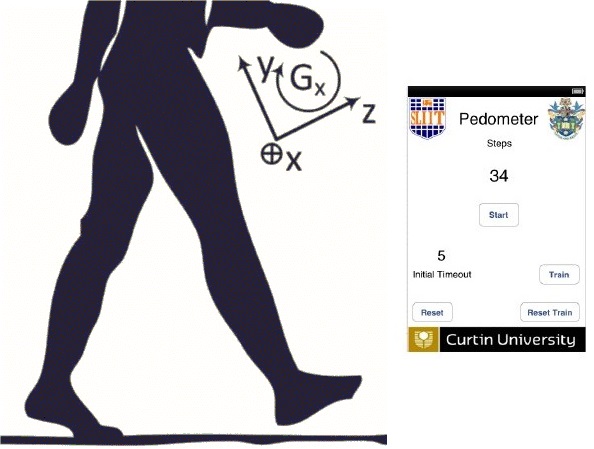
6. Modelling the Human Gait
Accurate step counting is a critical parameter in pedometer-based indoor localization systems in improving their accuracy and reliability. Higher accuracies are demanded by localization systems, especially at low walking speeds observed in natural walking. The situation may be worse with vision-impaired indoor navigation is considered, especially in an unfamiliar environment. In 2013, we introduced one of the world's first accurate pedometers developed using a single-axis of a gyroscope. The algorithm is inspired by the fact that human walking is an approximation of pendulum motion. The proposed algorithm is utilized in many assistive technology applications both in industry and academia.
We are currently aiming to develop a method to identify each individual based on their gait with the aim of utilizing it for biomedical applications.